
Boris.T.Fedosov
Rudny Industrial Institute,
Rudny, Kazakhstan
About author
UDC 681.51.01
F338
The Science starts there,
where measurings start,
but art there does not terminate
Computer video game Need For Speed 3, 1998 of issue of Electronic Arts [1] corporation at a sight of the author represents one of engineering and creative masterpieces. Situations which originate in a play and require fine control by the car, it is possible to compare to a game of chess which play on a break-neck velocity in 200 km\hs. Implementation by development engineers of a play of tactics of behaviour of virtual contenders in rapid motion simply admires. Level of difficulty of a race is very precisely selected under level of mastering of technique of driving by the player so, that the player in process of perfecting of skills of driving on the one hand plays all with major stress, and on the other hand, the play gives the chance to the player to win occasionally, gaining thereby motivation to further self-improvement.
Comprehensive studying of the named play can demand hundreds hours of a game time and the complex algorithms of examinations. In the given work outcomes of research of some characteristics of the sporting virtual car Lamborgini observed as the dynamic object of control are resulted only.
The virtual racing car can be observed as the dynamic object of control existing objectively and, therefore, its dynamic characteristics it is possible to research, and the car to expos identifications for the purpose of construction of its model.
For examination of accelerating characteristics has been selected stretched enough, straight-line, close to horizontal a segment of route Hometown, which length (approximately 300 m) allowed to accelerate on the direct car to the fourth drive inclusively:
Fig. 1. A segment of route Hometown on which examination of accelerating characteristics of Lamborghini Diablo SV sports car was carried out
For registration of variables of motion the video shooting was spent, values of variables of driving were measured by regular instruments of the car. Values of a velocity of driving and value of engine speed acted in film on frames and were handled in program MathCAD [1] where it was applied cubic a spline - interpolation. An acceleration and the transited path were determined by differentiation and velocity integration:
Fig. 2. The table of experimental datas and operators for graph plotting of motion characteristics Lamborghini Diablo SV in the environment of Mathcad
Results processing of measurings are displayed on fig. 3:
Fig. 3. Kinematic characteristics in the first ten seconds of boost of Lamborghini Diablo SV car with a self-acting box of the gear change
Apparently on fig. 3, at the start moment the car begin to be accelerated vigorously, the engine gains speed, and with them, as is known, to some pores torque, therefore a an acceleration of the car smoothly is increased also. On a velocity of 90 km\hs (25 m\s) the self-acting box of the gear change switches on a middle gear and further, in process of boost, switches on the following. Thus engine speed are maintained in an optimum band from 4.9 to 6.3 thousand rev/sec in which torque of the engine is close to maximum 443 lb· ft = 5900 Н· m, reached at 5500 rpm (rev/min).
Application of operation of differentiation at processing of experimental datas not the best version, this operation reinforces effect of errors of measurings. Nevertheless, cubic a spline - interpolation, apparently on fig. 3, allows in essential extent to reduce negative effect of differentiation. Probablly, in some cases for flattening of experimental datas it is more expedient to apply least-squares fitting criterion.
In some places of some routes of rapid motions the car, at motion with enough high speed is lifted off from road and some distance flies by. This can use condition for determination of coefficient of an aerodynamic drag of the car.

Fig. 4. Lamborghini Diablo SV in flight on route Country Woods
The characteristics of flight gained experimentally and computed, are resulted on the diagramme fig. 5:

Fig. 5. Characteristics of flight of the car at departure from a tunnel on route Country Woods (direction Backward). The braking created by air drag, noticeably varies throughout flight, that not to the full corresponds to the reality. Actually an acceleration should decrease smoothly with velocity decrease. The average value of the acceleration created by air drag, makes approximately -5 m\s2, that much more, than in a reality (see more low)
The car aerodynamic quality is determined by a drag coefficient C х . It links a velocity of motion V and force of resistance F. In practice in evaluations of force of air drag use the ready formula [3]
(1)
F = p·Сх·S(V2/2),
Square of the frontal projection Lamborghini Diablo SV it is definable on a photo and car overall dimensions:
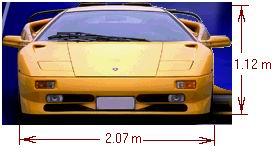
Fig. 6. Midsection Lamborghini Diablo SV. Its) square is approximately equal 2.1 m2
From fig. 5 it is possible to determine average value of a an acceleration of the car, created by air drag in flight. This value on a velocity of 50 m/s approximately equally - 5 m/s2. A mass m refuelled car Lamborghini Diablo SV with the driver we will receive equal 1800 kg (a mass empty 1612 kg). Then force of braking will make
(2)
F = m · a = 1800 kg ·5 m/s2 = 9000 N,
Such value is represented essentially uprated. Really, according to technical datas, actual Lamborghini Diablo SV at power in 529 h.p. (400 kw, 7100 RPM) advance a top speed in 335 km/hs (93 m/s). It is obvious, that force of braking which overcomes the engine, makes:
(3)
The majority (3) concerns to air drag braking. From matching (2) and (3) is visible that in play NFS 3, air drag on a velocity twice smaller, than maximum when the air drag should be four times smaller than in (3), it is accepted 10 times higher in comparison with that value which should be in a reality.
Outcomes of determination of a velocity of flight can be displayed by the regular speedometer of the virtual car not correct as for real cars the speedometer is connected to wheels, instead of acts by a principle of the aircraft velocity metres grounded on measuring of a wind-blast pressure of air. Nevertheless, receiving as a first approximation motion in flight uniform retarded and knowing velocity varying between separations and tangentings when the speedometer gives correct evidences, it is possible to evaluate an acceleration by division of varying of a velocity into flight time. Such estimation yields outcomes, close to resulted on fig. 5. So, for this flight it is gained, that and = 4.3 m/s2. Flight at departure from "barn" on route Country Woods gives deboosting (negative acceleration) of 7.8 m/s2, and flight in the same place on route Hometown transits with mean deboosting in 10.8 m/s2!
Considering (1) and (2), it is possible to gain:
(4)

That will not agree at all with actual coefficient which, even approximately, considering aerodynamic cleanness of body Lamborghini Diablo SV, should be 10 times less the gained value, for example 0.2 - 0.3.
Was possiblly, development engineers have uprated air drag for the purpose of rise of effect of presence.
Braking the important regime of driving of the car, defining safety and an admissible velocity of driving. Studying of characteristics of braking was spent on the same segment of route Hometown fig. 1 where boost was investigated. The computer was accelerated on a prior distance to a velocity in 200 - 230 km/hs and then gas was released and the brake up to a car stopping joined. Outcomes are resulted on fig. 7.
Fig. 7. Characteristics of braking Lamborghini Diablo SV on a straight-line segment of a route. Deboosting (the negative acceleration) is practically fixed, is approximately equal -10 m/s2 and does not depend on a driving velocity. Therefore the velocity is linearly diminished eventually. The self-acting gear box does not disable the engine on a stopping segment and as gas is released some contribution to braking probablly imports also the engine
The Fig. 7 allows to evaluate force of braking. For acceleration average value - 10 m/s2
(5)
F = m · a = 1800 kg · 10 m/sec 2 = 18000 N,
Apparently from (5) force of braking it is equal to car weight that would seem, was not possiblly as the coefficient of friction of rubber tyres on asphalt does not exceed 0.5 - 0.8. But in view of special aerodynamics of body Lamborghini Diablo SV under the bottom there is an atmospheric attenuation of air which "sucks in" a car to road. It allows to gain on the considerable velocities force of braking major, than car weight. But on rather low speeds force of braking should be less.
The experimental dependence of length of a braking distance and deceleration time on the driving velocity, plotted in MathCAD is resulted on fig. 8.
Fig. 8. Dependence of deceleration time and a braking distance on a velocity for virtual Lamborghini Diablo SV. Deceleration time practically linearly depends on a velocity. The aspect ratio is equal 3 sec/100 km/h. The braking distance is proportional to a velocity square. These properties are determined by that development engineers NFS 3 preset a stationary value force of braking which is not dependent on a velocity
Thus, car braking is implemented in NFS 3 by means of the simplified algorithm. On rather low speeds force of braking should be essentially, on some tens percent it is less
Let's begin with the simple model. We will pay attention, that at start from a place on the low gear a mean acceleration of the car approximately equally 7 m/s2 (see fig. 3). Gas joins pressing the key « the Arrow Up». We will accept, that thus on model the unit signal acts. The velocity is an integral from the acceleration, the transited path - an integral from a velocity. Therefore the elementary model will become:
Fig. 9. The elementary approximated dynamic model of sports virtual car Lamborghini Diablo SV in regimes of boost on the low gear and brakings
Mean acceleration in 7 m/s2 accelerates model for three seconds practically to the same velocity, as Lamborghini Diablo SV (fig. 3 see).
Apparently on fig. 7, a an acceleration of the car at braking makes - 10 m/s2. It is approximately equal to value of 7 m/s2, accepted in observed model, therefore the elementary model mirrors properties of the simulated car not only at boost in the low gear, but also at braking. Really, both on fig. 7 and on fig. 9 braking from a velocity of 25 m/s to a stopping lasts about 3 sec though the model thus transits longer path.
The basic positive feature of constructed model is its ease. It) represents the main thing in dynamics of boost and car braking: the velocity and the transited path are determined by accumulation of operation of treadles of gas or a brake, executed by integrators. This model can be for the initial thumbnail for construction of more and more detail models which will demand application of additional blocks, including nonlinear.
Let's make one more step for a model improvement. We will consider (fig. 3), that on an acceleration segment from a place on the low gear the acceleration leaps in the beginning abruptly to approximately 5 m/s2, and then grows under the law, close to linear to 9 m/s2, approximately for 3 sec, i.e. with a velocity of 1.3 m/s3. It allows to build model in which operation of a treadle of gas not simply leads to proportional value of an acceleration, but also to accumulation of this operation in due course. As well as earlier, we use for this purpose the integrator. The student, wich studying the automatic control theory finds out at once in the gained unit so-called PI-regulator (control unit). As a result, the updated scheme of model will become:
Fig. 10. The updated approximated dynamic model of sports virtual car Lamborghini Diablo SV in a regime of boost on the low gear
Apparently on fig. 10, increment of an acceleration in process of boost of the car allows to play back more precisely character and values of the variables characterising its motion. An acceleration increases in due course from initial value in 5 m/sec2 with a velocity of 1.3 m/sec3. Therefore a velocity line not so direct, it has gained a turn-up. On an acceleration segment the velocity in model increases faster, than under the linear law that is closer to properties of the virtual car.
Further improvement of model at which there can be models of the engine, clutches, a self-acting box of the gear change, model of force of a tractive resictance of the car considering a nonlinear dependence from its velocity and other factors, and also containing feedback, it is possible to suggest to execute to careful readers.
The procedure of the analysis of the virtual dynamic object by means of videorecords of fragments of its behaviour in various regimes allows to determine the kinematic properties of the object and on the basis of gained outcomes to build its quantitative dynamic model.
Dynamics of real car Lamborghini Diablo SV is played back in a computer (video) game with a plausibility high scale. However deboosting of a velocity of motion in flight is preset 10 times higher, than in a reality. Force of braking is besides, uprated also at rather low speeds of motion.
NFS 3 not only purely technical implements virtual analogue of an actual racing motor vehicle. Somewhat it and a work of art. At such sight at a play noted deviations from the reality can be considered admissible and justified. But at agings of racing drivers - professionals these singularities should be considered.
NFS 3 allows to lead more many investigations, in particular, to determine the spatial process of scaling and as it matches up with speedometer indications is how much precisely executed.
It is interesting to find out also, whether decides NFS 3 differential equations presenting objects or algorithm of description it is implemented by more simple ways? The lead consideration does not give to the full the answer to this problem. Though the braking description, most likely, implements the simplified algorithm.
Virtual analogues of hardware systems and objects can and should be researched about depth of correspondence not only at level of qualitative expert estimations, but also quantitatively. For this purpose it is required to develop appropriate measurement procedures and to work out criteria of correspondence. Thus, it is a question of engineering work in the virtual world.
The spent consideration displays, that, playing computer games it is possible not only to take pleasure purely in a play, but also to discover a capability for realisation of researches. It is useful both to the schoolboy, and the student concerning the invention and mastering of engineering of realisation of explorations. And who knows, maybe, such investigations will lead not toy, and to the useful conclusions in practice and even to discoveries?
Identification and simulation of virtual dynamic objects can quite become a subject of course or degree works for students of appropriate trades.
Making is represented reasonably interesting, not upsetting copyrights of development engineers of computer games, autopilots for control from the outside virtual dynamic objects.
Let's mark one more singularity NFS 3 which are beyond lead consideration: the outcome of the player in rapid motion essentially depends on his physical and mental status. It is practically impossible to win the fatigued status. Therefore, on the one hand this game, probablly, can be for psychologists the instrument of studying of a status of the player. On the other hand, it displays, as at control of the present motor vehicle the driver makes it better or worse depending on the status which variations for him can be and are not appreciable.
The given article should be observed not as commercial of the already repeatedly renovated game, and as recognising of merits of its development engineers: Sam Deasy and all NFS 3 command, and gratitude of the author for the pleasure gained by him at mastering and study of a game.
Concerning examination of a competence of virtual laboratory benches and realisation of virtual measurings see also
20.12.2004 - 25.01.2011